
Il motore passo-passo (stepper o step motor) Funzionamento, Pregi e Difetti
Il motore passo-passo spesso chiamato anche step o stepper è un motore elettrico sincrono in corrente continua pulsata con gestione elettronica senza spazzole (brushless) che può suddividere la propria rotazione in un grande numero di passi (step).
La posizione del motore può essere controllata accuratamente senza dover ricorrere al controllo ad anello chiuso se la taglia ed il tipo di motore sono scelti in modo adeguato all'applicazione.
È considerato la scelta ideale per tutte quelle applicazioni che richiedono precisione nello spostamento angolare e nella velocità di rotazione, quali la robotica, le montature dei telescopi ed i servomeccanismi in generale.
Un motore simile è il motore brushless, che si differenzia per uno statore che viene alimentato perennemente in tutte le sue parti e non a rotazione, questo conferisce maggiori velocità di rotazione e potenze, ma non permette un controllo altrettanto preciso della posizione del rotore.
Un motore simile è il motore brushless, che si differenzia per uno statore che viene alimentato perennemente in tutte le sue parti e non a rotazione, questo conferisce maggiori velocità di rotazione e potenze, ma non permette un controllo altrettanto preciso della posizione del rotore.
|
|
Vantaggi:
- Se costruiti con tecnologia comune hanno un costo non elevato, relativamente ad altri tipi di motore con analoghe prestazioni.
- È possibile realizzare azionamenti di precisione controllati da computer in catena aperta, cioè senza utilizzare sensori di posizione o di velocità. Sono quindi utilizzabili con relativa semplicità e senza richiedere particolare potenza di calcolo.
- Hanno un'elevata robustezza meccanica ed elettrica: infatti non esistono contatti elettrici striscianti e, se necessario, possono essere realizzati anche in ambiente completamente stagno.
- È facile far compiere all'albero piccole rotazioni angolari arbitrarie in ambedue i versi e bloccarlo in una determinata posizione.
- La velocità di rotazione può essere molto bassa anche senza l'uso di riduttori meccanici.
- Hanno molto spesso momento d'inerzia piuttosto basso
- Sono molto stabili nella posizione a rotore bloccato e non presentano pendolamenti come accade nei sistemi brushless
- Se dimensionati bene non necessitano di alcuna taratura.
Difetti:
- Richiedono sempre circuiti elettronici per il pilotaggio, in genere di tipo digitale.
- Hanno un funzionamento a scatti e producono vibrazioni, soprattutto ai bassi regimi e se si adottano le tecniche di pilotaggio più semplici.
- Il loro rendimento energetico dipende dalla tecnologia costruttiva adottata. La coppia misurata in Nm (Newton per metro), a parità di assorbimento in corrente, dipende spesso dal tipo di pilotaggio elettrico/elettronico adottato.
- Permettono una velocità di rotazione massima intorno a 1000-1500 rpm. Esistono tuttavia motori che raggiungono i 4000-5000 rpm tramite sistemi di retroazione ad anello chiuso. La loro caratteristica di coppia tuttavia scende quasi esponenzialmente al crescere della velocità.
- Producono molto calore già dopo pochi minuti di funzionamento.
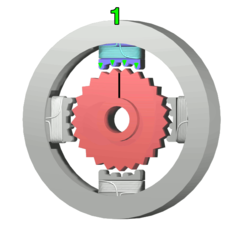
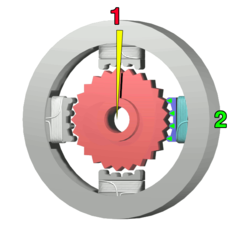
L'elettromagnete in alto (1) viene eccitato, attraendo il dente più vicino di un attrezzo a forma di rotore metallico. Con il dente allineato all'elettromagnete 1, inizierà la rotazione verso l'elettromagnete 2.
L'elettromagnete in alto (1) viene spento e viene eccitato l'elettromagnete a destra (2), tirando il dente successivo leggermente verso destra. Questo processo produce una rotazione di 3.6° in questo esempio.
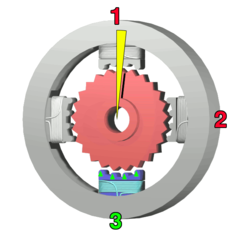
L'elettromagnete in basso (3) viene eccitato; si verifica un'altra rotazione di 3.6°.
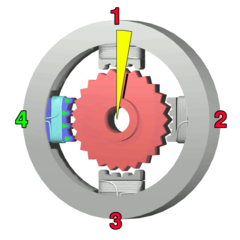
L'elettromagnete a sinistra (4) viene eccitato, si ha un'altra rotazione di 3.6°. Quando l'elettromagnete in alto (1) sarà di nuovo eccitato, i denti del rocchetto dovranno ruotare nella posizione successiva; poiché vi sono 25 denti, occorrono 100 passi per realizzare una rotazione completa.
