Motore Monofase Trifase Sincrono
Il motore sincrono è un tipo di motore elettrico in corrente alternata la cui velocità di rotazione è sincronizzata con la frequenza elettrica.
Comunemente si tratta di motori con alimentazione trifase, ma i motori sincroni di piccola potenza sono spesso alimentati con la comune tensione monofase disponibile nelle abitazioni.
La stessa macchina elettrica che funge da motore sincrono può essere utilizzata anche come generatore elettrico, e in questo caso è detto alternatore; la maggioranza dei generatori elettrici è in effetti di questo tipo.
È costituito da un rotore (parte rotante solidale all'albero) su cui sono presenti diversi poli magnetici di polarità alterna creati da magneti permanenti o elettromagneti alimentati in corrente continua (detta corrente di eccitazione), e da uno statore su cui sono presenti gli avvolgimenti del circuito di alimentazione.
Le espansioni polari dello statore creano un campo magnetico rotante che trascina le espansioni polari del rotore.
Le espansioni polari dello statore creano un campo magnetico rotante che trascina le espansioni polari del rotore.
La frequenza meccanica del motore sincrono è:

dove fV è la frequenza elettrica (ad esempio in Italia è 50 Hz, negli Stati Uniti è 60 Hz) e p è il numero di espansioni polari per ogni fase presenti nel motore.
Motori con più espansioni polari per fase hanno velocità più basse ma sviluppano più coppia meccanica
Motori con più espansioni polari per fase hanno velocità più basse ma sviluppano più coppia meccanica
L'avviamento di questo tipo di motore è relativamente complesso perché il rotore ha una coppia di trascinamento solo ed esclusivamente se sta girando alla stessa frequenza della corrente alternata dello statore.
Quindi a motore fermo l'applicazione della tensione alternata non è in grado di produrre l'avviamento del motore perché il rotore ha coppia nulla.
Per questo, il motore viene inizialmente portato alla velocità di rotazione finale per mezzo di un motore asincrono, quindi, dopo avere scollegato quest'ultimo, viene collegata la tensione di alimentazione alla stessa frequenza di rotazione raggiunta e, successivamente, inserito il carico meccanico utilizzatore.
Quindi a motore fermo l'applicazione della tensione alternata non è in grado di produrre l'avviamento del motore perché il rotore ha coppia nulla.
Per questo, il motore viene inizialmente portato alla velocità di rotazione finale per mezzo di un motore asincrono, quindi, dopo avere scollegato quest'ultimo, viene collegata la tensione di alimentazione alla stessa frequenza di rotazione raggiunta e, successivamente, inserito il carico meccanico utilizzatore.
Negli ultimi anni l'utilizzo dell'elettronica di potenza consente di regolare sia la tensione (e quindi la corrente) di alimentazione che la frequenza, a partire da frequenza nulla e facendola crescere molto gradatamente in modo da avere con continuità una coppia in grado di accelerare il motore.
Rispetto ad un motore asincrono, il motore sincrono non è in grado di adattarsi a variazioni significative della coppia resistente; infatti, se una volta a regime la rotazione viene frenata o accelerata oltre un certo limite, si innesca una serie di oscillazioni che portano il motore al blocco e possono provocare forti sovracorrenti tali da danneggiare il motore; inoltre va prevista una protezione dalle sovracorrenti.
Esistono anche piccoli motori sincroni ad avvio automatico ed alimentazione monofase utilizzati in meccanismi temporizzatori quali i timer delle lavatrici domestiche e un tempo in alcuni orologi, sfruttando la buona precisione della frequenza della rete elettrica.
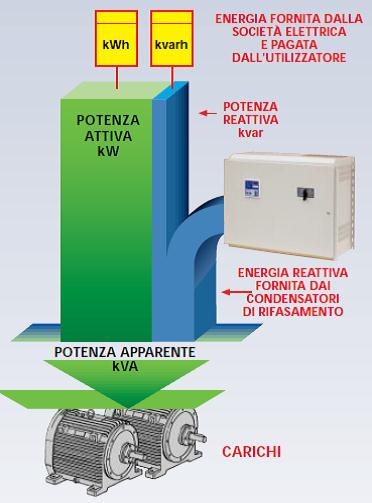
Se non si applica nessun carico e si alimenta il motore per ottenere la caratteristica ohmico-capacitiva, si otterrà un compensatore elettrico rotante, poiché la caratteristica ohmica sarà ridotta al minimo.
Questo è utilizzato come sistema di rifasamento soprattutto nelle centrali di trasformazione dell'energia elettrica.
a quantità di energia reattiva che può fornire il compensatore rotante è tanto maggiore quanto maggiore è la sovraeccitazione della macchina.
Il compensatore sincrono, o rifasatore rotante, è oggi perlopiù sostituito da gruppi di rifasamento composti da condensatori statici.
Questo è utilizzato come sistema di rifasamento soprattutto nelle centrali di trasformazione dell'energia elettrica.
a quantità di energia reattiva che può fornire il compensatore rotante è tanto maggiore quanto maggiore è la sovraeccitazione della macchina.
Il compensatore sincrono, o rifasatore rotante, è oggi perlopiù sostituito da gruppi di rifasamento composti da condensatori statici.